Conception
A.Bon de commande
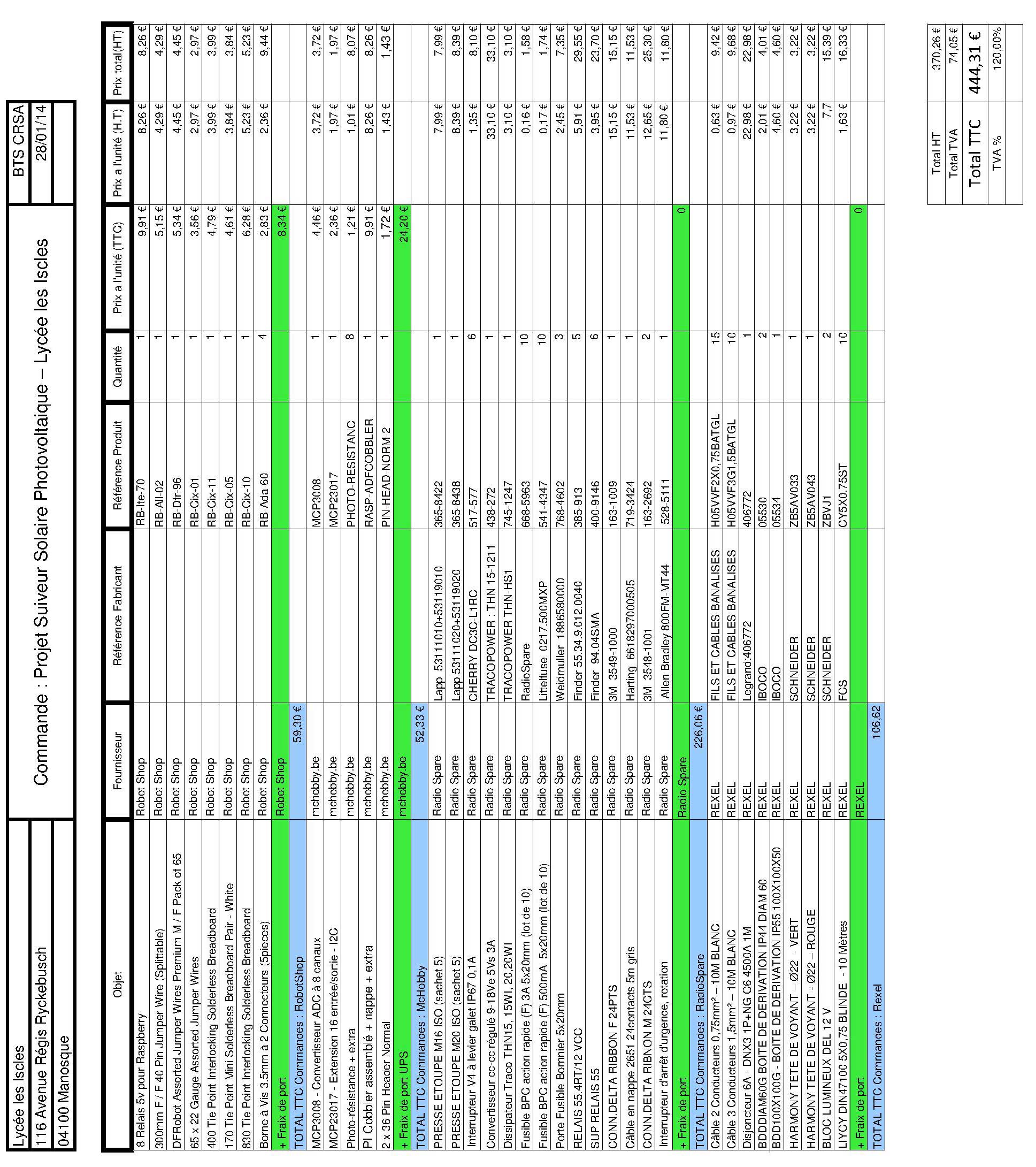
(cliquer pour agrandir)
B. Conception partie opérative
Comme nous avions des actionneurs prédéfinis, la conception préliminaire a pu être réalisée dans un cadre plus simple suite à notre étude cinématique.
Actionneurs prédefinis :
- Moteur de parabole ( ILLUSION MOT-SAT3 )
- vérin électriques ( Vérin XP350+ ) , doc. technique : Fiche technique moteur verin.pdf
 |
 |
Sous-Ensemble 1100 :
En premier lieu il aura fallu s'adapter aux contraintes de nos actionneurs, les principaux points à travailler étant les liaisons, les fixations.
1. Ensemble
- Assemblage total : MEP_10000_Suiveur_Solaire
2 .Mise en plan
- Assemblage bati : MEP_1000_SE_BATI
- Sous-Ensemble bati : MEP_1100_BATI
- Sous-Ensemble Bras de transport : MEP_1400_bras_de_transport
- Assemblage bras de guidage : MEP_2000_SE_bras_de_guidage
- Sous-Ensemble couplage moteur : MEP_2100_couplage_moteur
- Assemblage support en I et panneau : MEP_3000_SE_Panneau_Support_en_I
- Sous-Ensemble Support en I : MEP_3100_Support_en_I_du_Panneau
- Sous-ensemble capteur photo-resistant : 3300_Ensemble_capteur_photo-resistant
- Sous-ensemble fixation capteur photo-resistant : 3400_fixation_capteur_photo-resistant
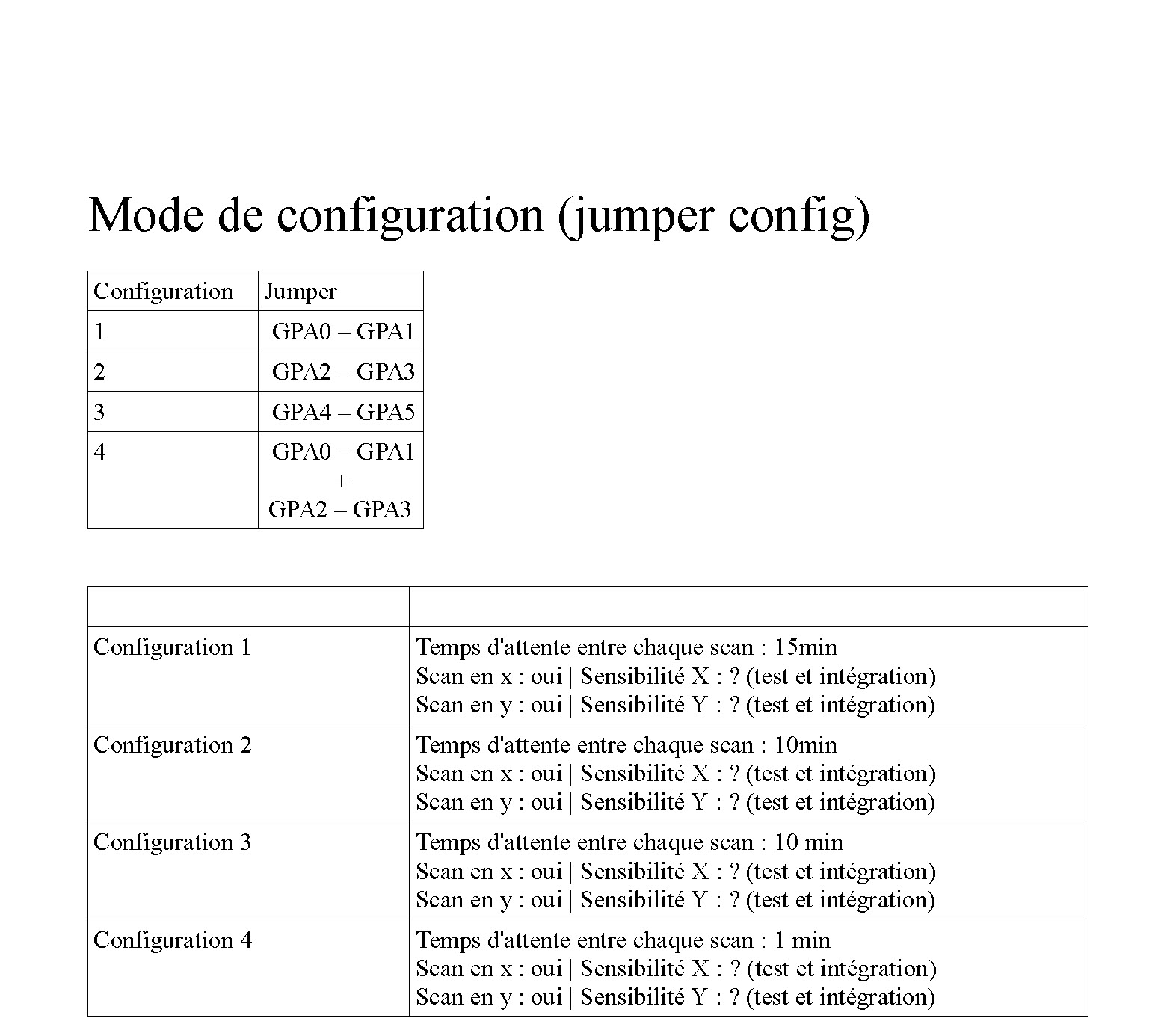
C. Conception partie commande
Bilan Entrée / Sortie
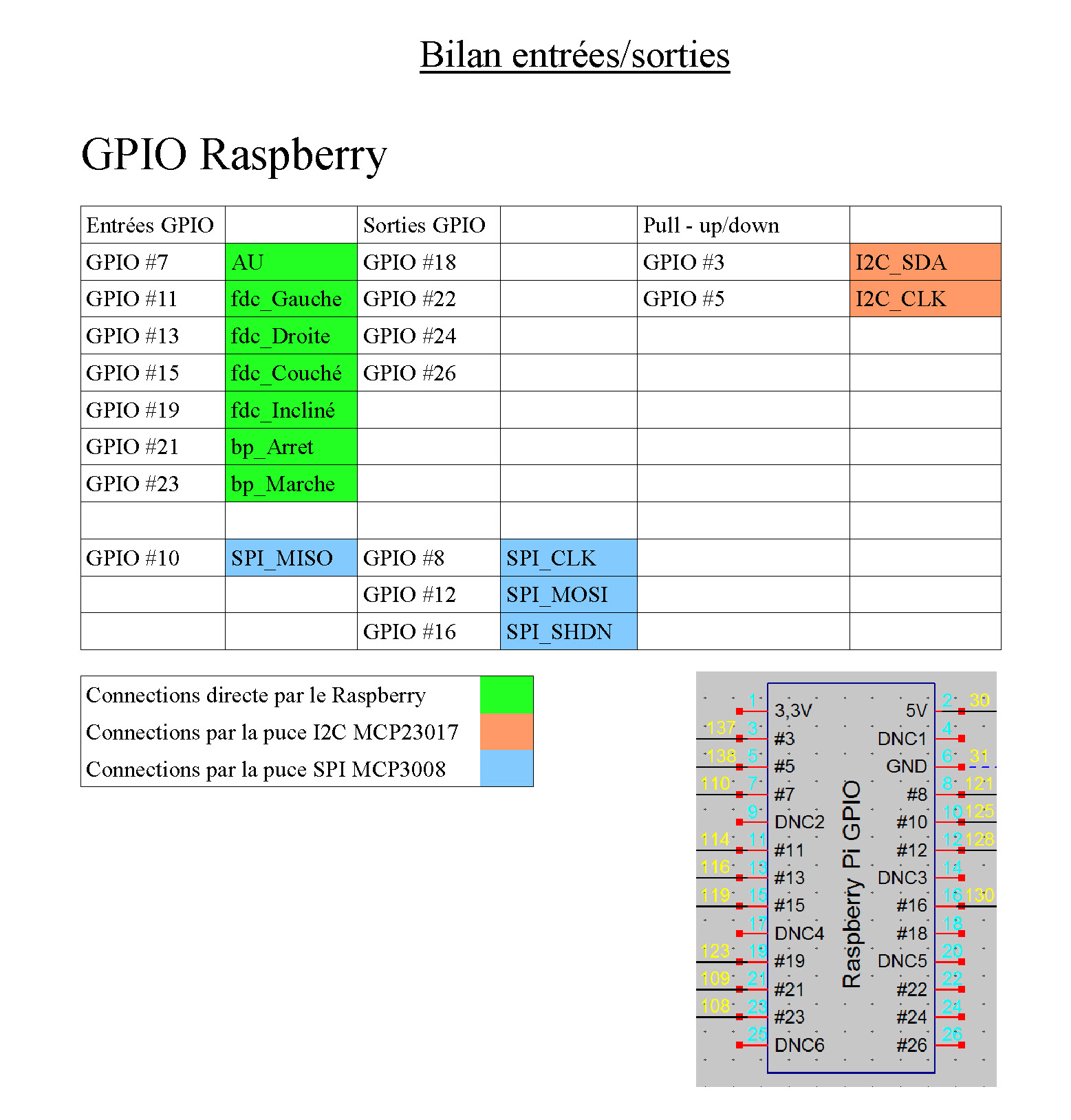 |
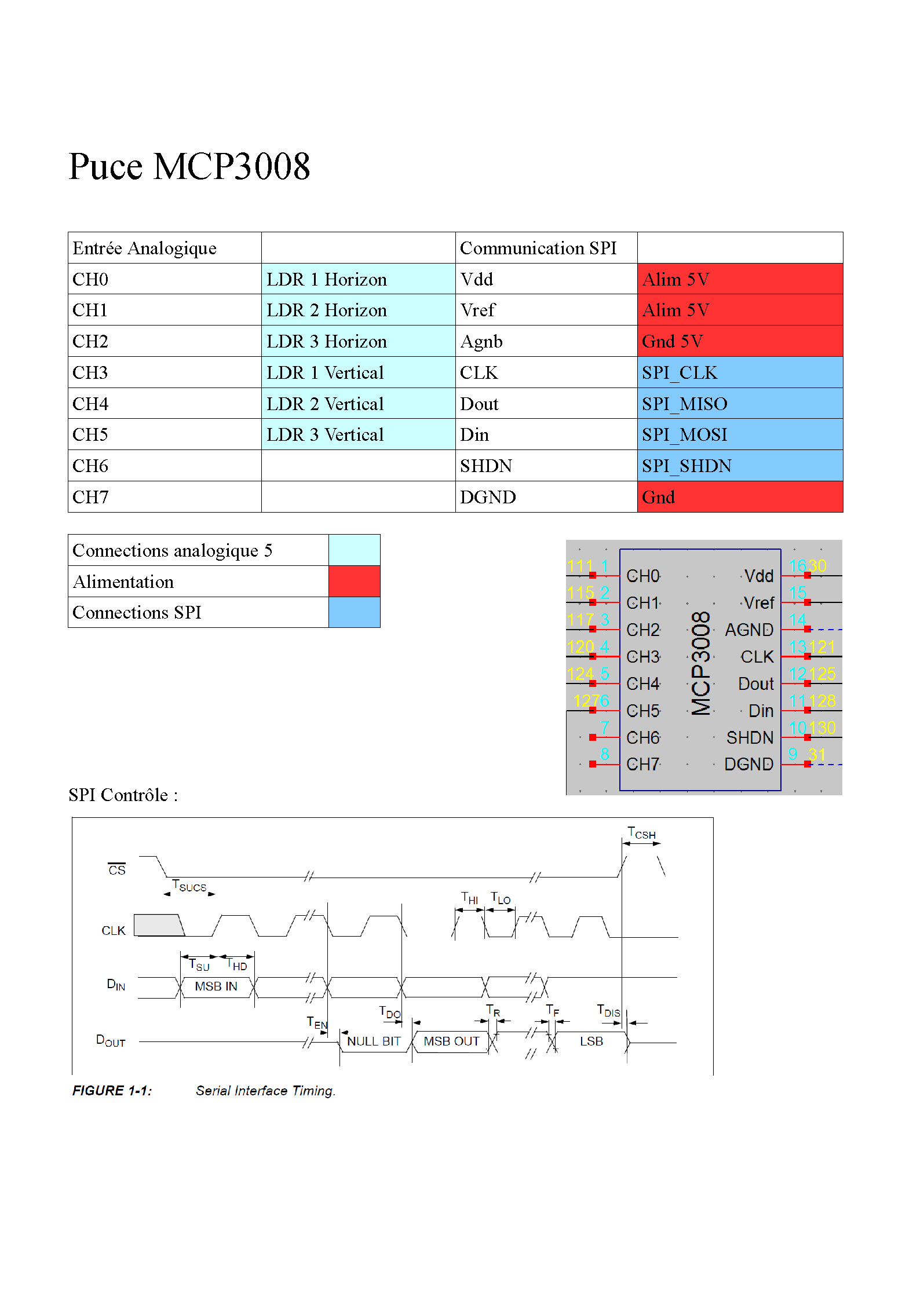 |
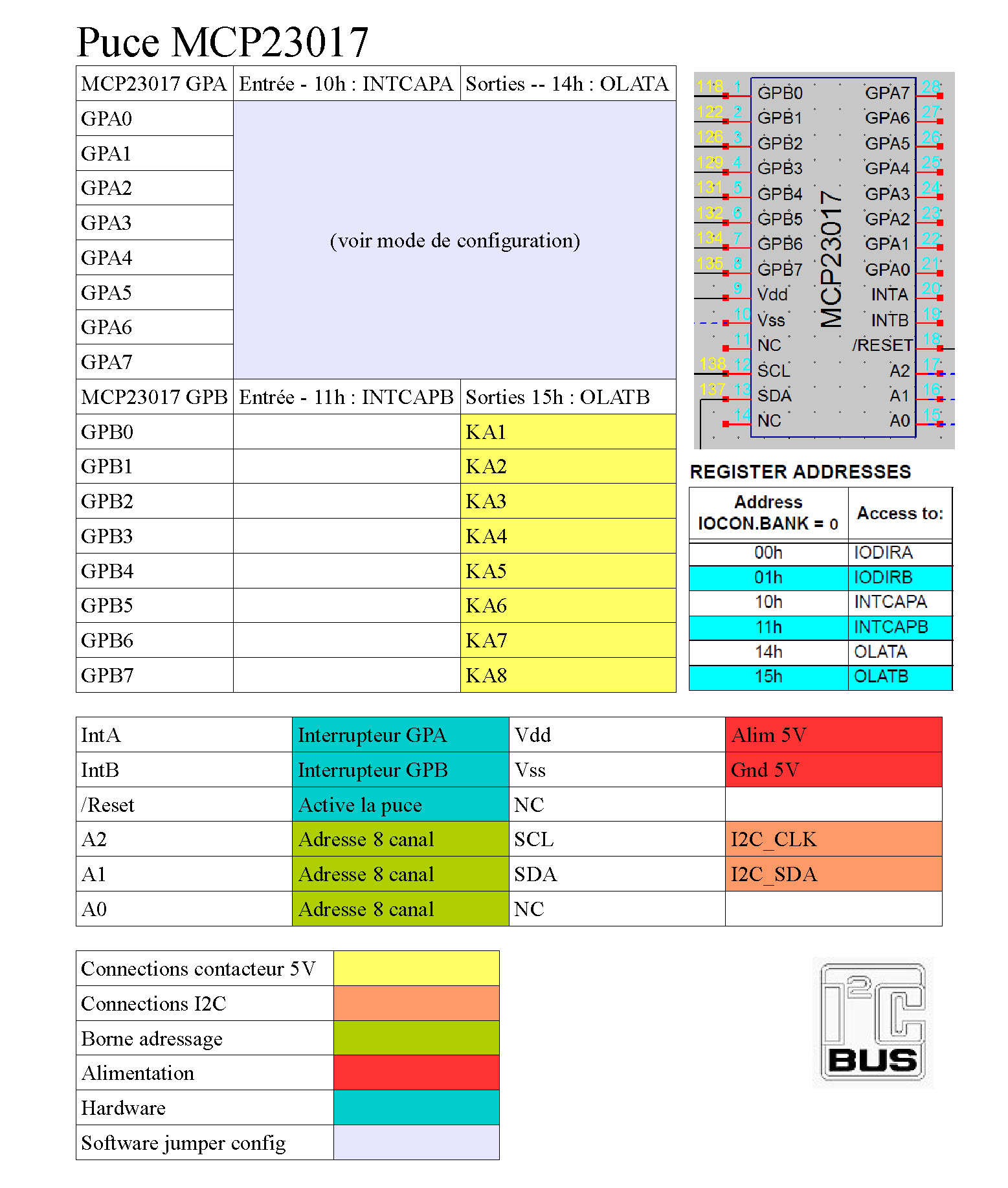 |
 |
1. Gemma
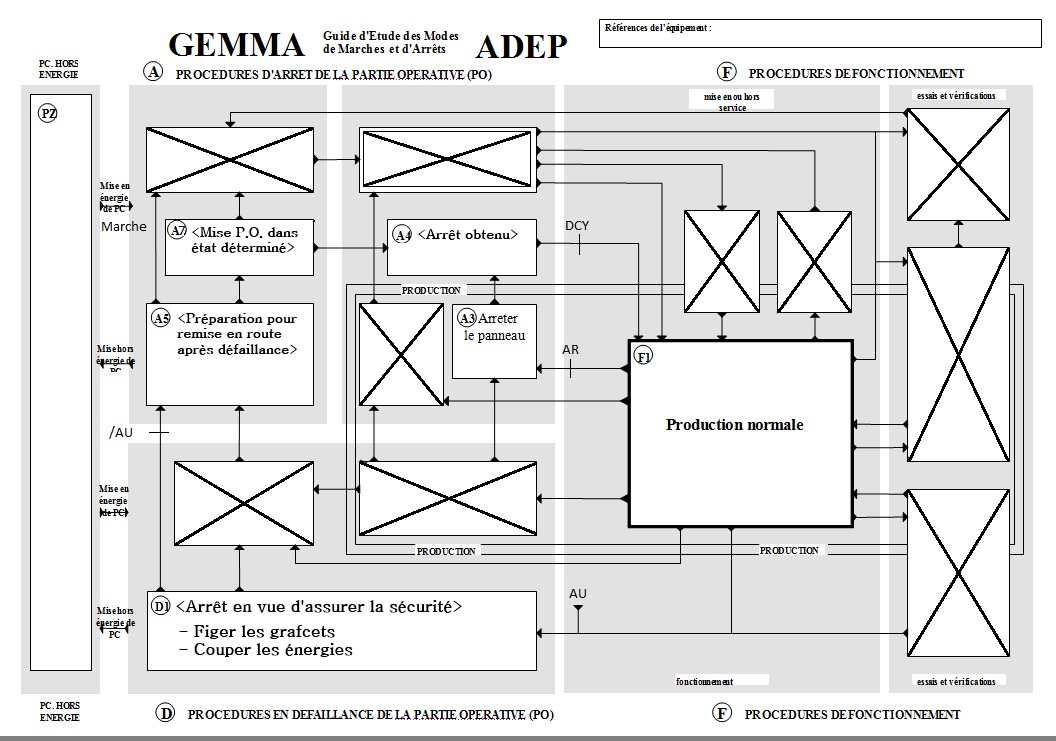
(cliquer pour agrandir)
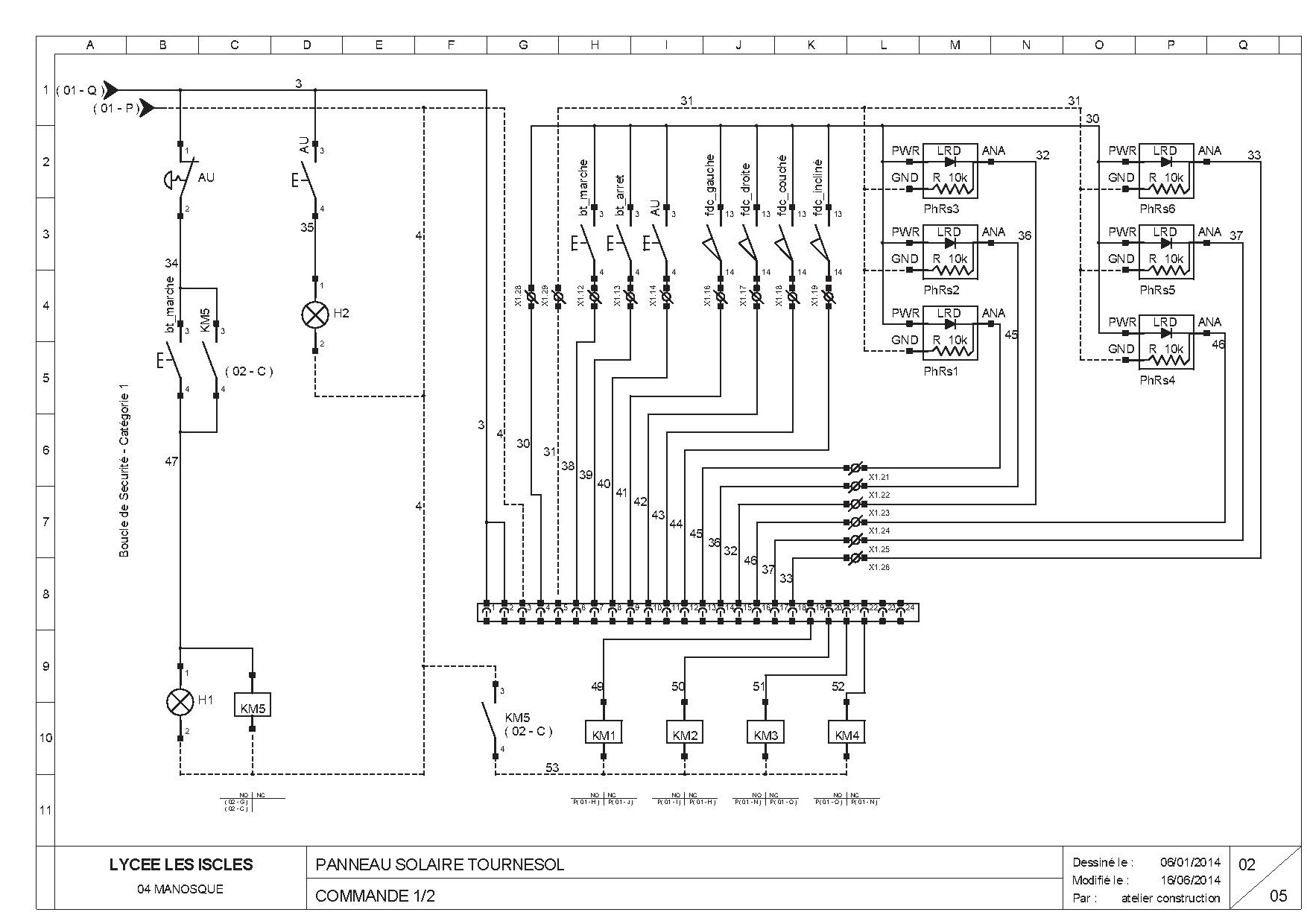
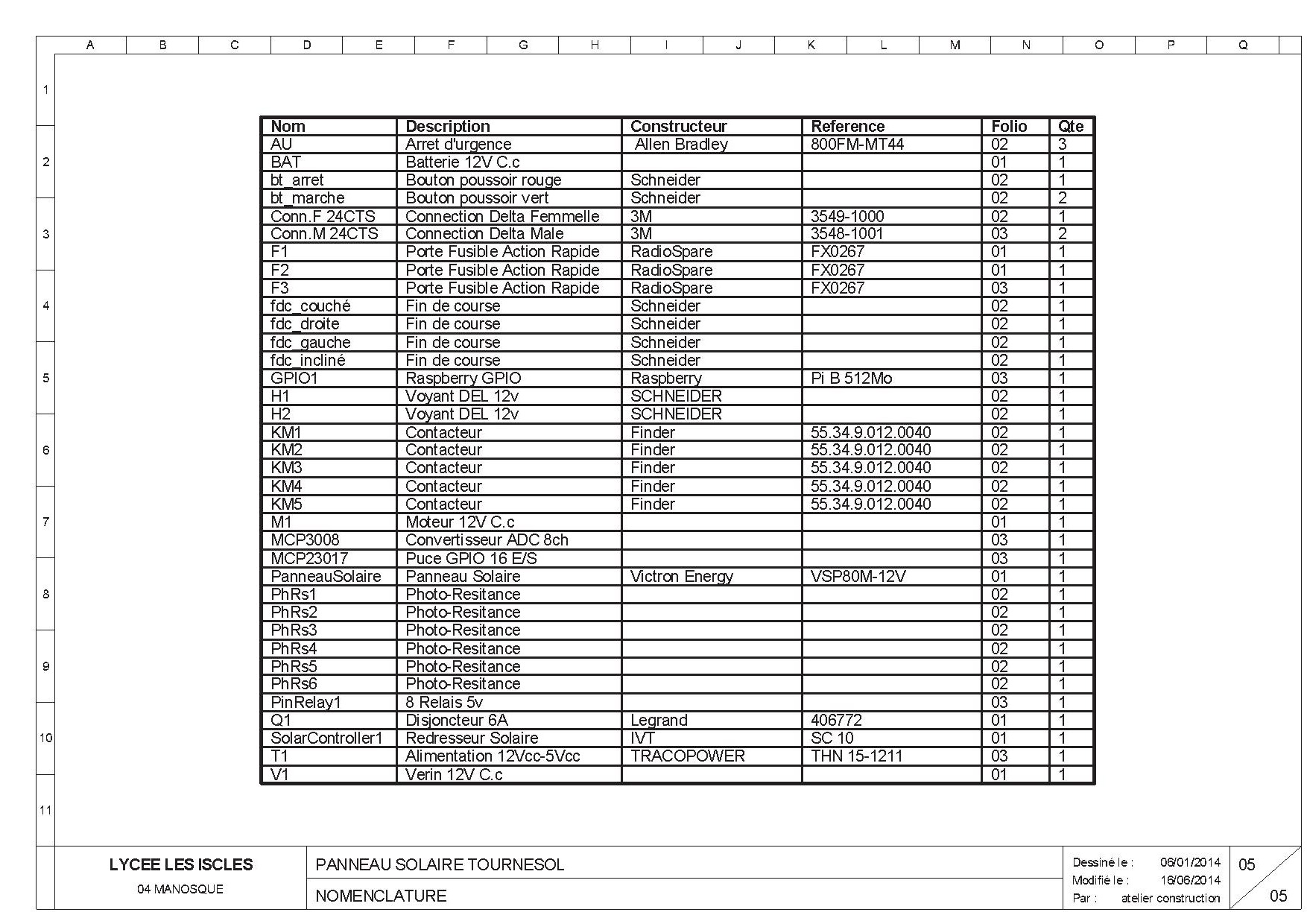
2. Schéma
Fichier pdf : cablage-v1.4.pdf
Fichier WinRelais : cablage-v1.4.xrs
 cablage-v1.4.jpg-page1 |
 cablage-v1.4.jpg-page2 |
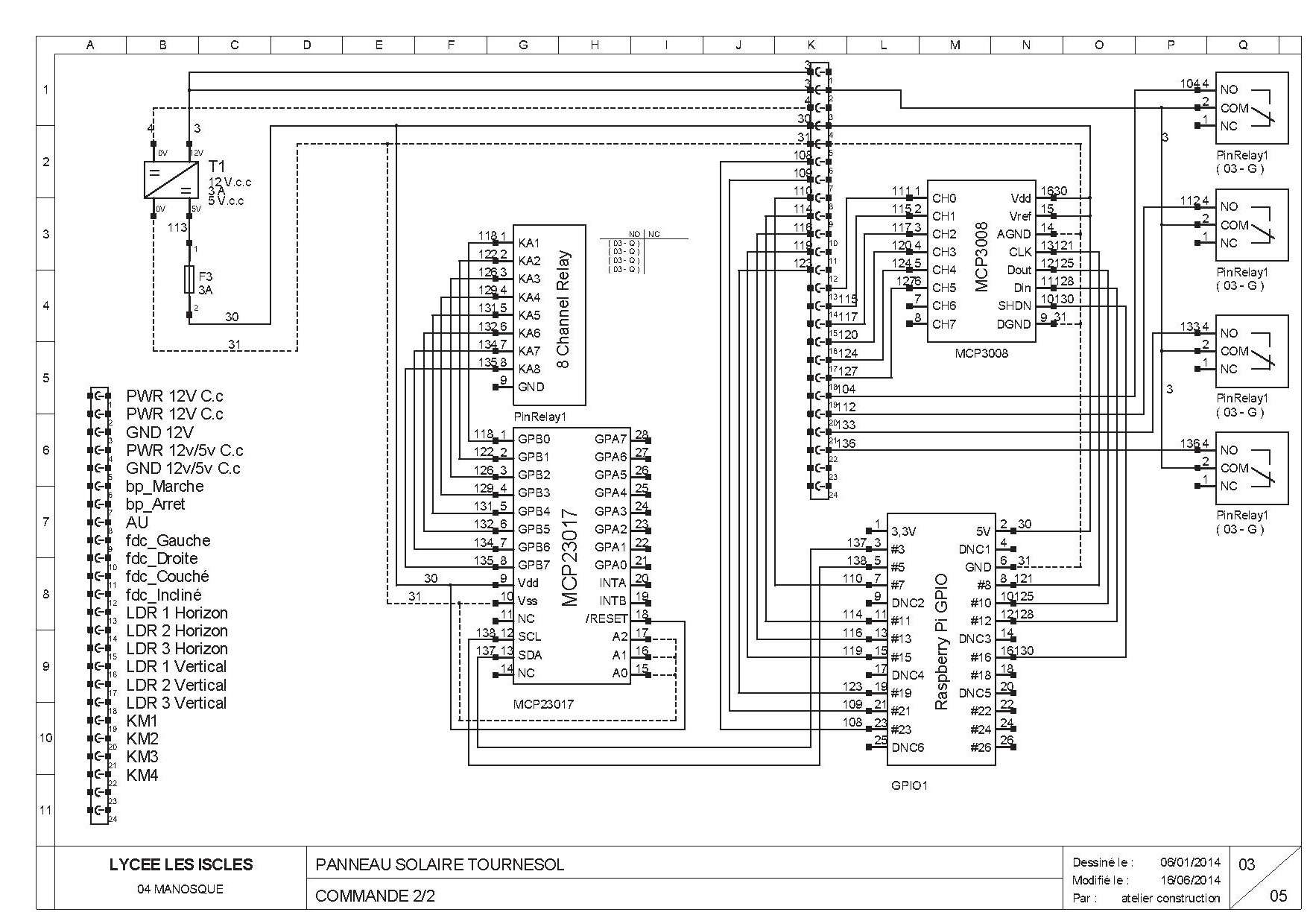 cablage-v1.4.jpg-page3 |
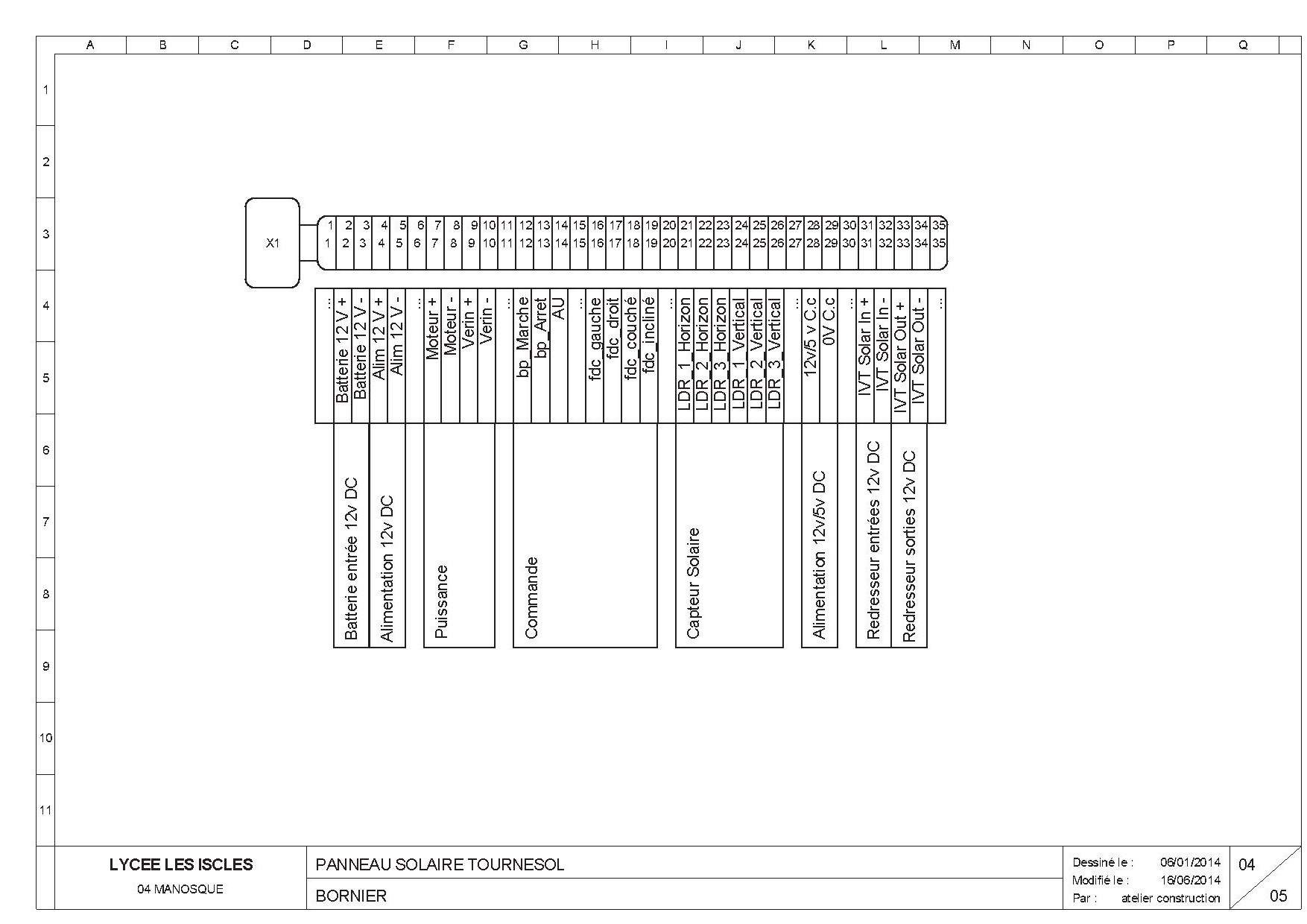 cablage-v1.4.jpg-page4 |
 cablage-v1.4.jpg-page5 |
(cliquer pour agrandir)
3. Grafcet point de vue opérative
Fichier ets (EdiTSAB) : Grafcet-PO_Lycee.ets
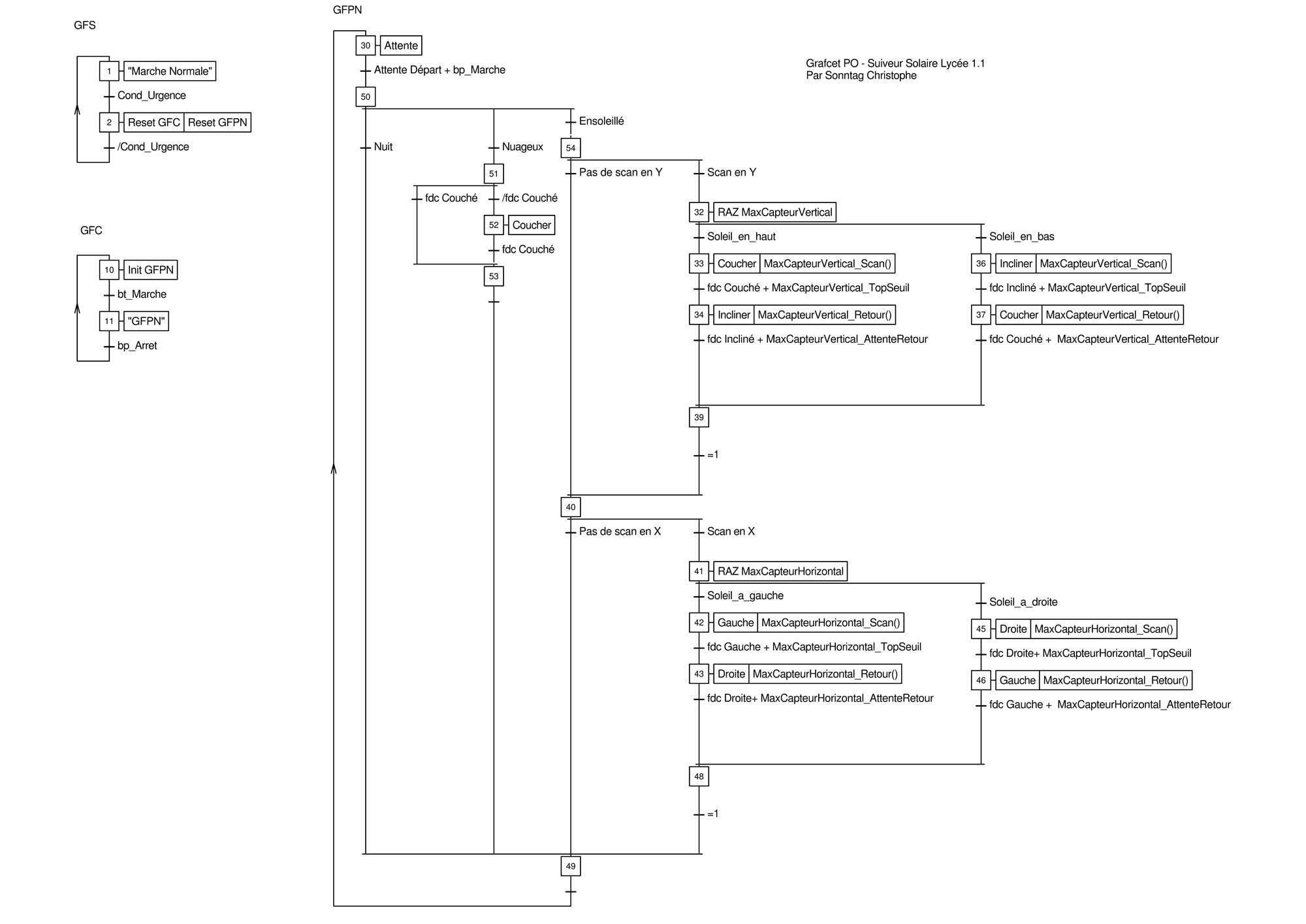
(cliquer pour agrandir)
4. Grafcet point de vue système
Programme cpp en fin de construction ...